ДОСЛІДЖЕННЯ КОМПАНОВОК ПРИВОДІВ КОВШОВИХ ЕЛЕВАТОРІВ САМОНЕСУЧОЇ КОНСТРУКЦІЇ ПРОДУКТИВНІСТЮ ПОНАД 300 Т/ГОД
17.01.2024 23:01
[3. Технические науки]
Автор: Курган Володимир Олегович, аспірант, Національний університет «Одеська політехніка»; Курган Віктор Олегович, кандидат технічних наук, Національний університет «Одеська політехніка»
Ковшові елеватори, за несучою здатністю, поділяються на два типи: самонесучі і не самонесучі. Не самонесучі ковшові елеватори, для встановлення та обслуговування, потребують робочу вежу, яка є несучою конструкцією та має сходи для зручності обслуговування. На відміну від не самонесучої, самонесучі ковшові елеватори можуть бути встановлені як самостійний пристрій, йому не потрібна робоча вежа. Для забезпечення вертикальної і вітрової стійкості, конструкцію необхідно зафіксувати до зерносховища, або за допомогою розтяжок. Такі ковшові елеватори мають певну конструкцію та додатково комплектуються майданчиками обслуговування, відпочинку та сходами.
Основною проблемою у розробці високопродуктивних самонесучих ковшових елеваторів є їх масові характеристики. Маса таких елеваторів може сягати більше 10 т, що в свою чергу вимагає міцну і надійну конструкцію всіх елементів, які в змозі будуть нести відповідні навантаження від власної ваги та продукту що транспортується. Також розкріплення таких ковшових елеваторів потребує індивідуального підходу до розкріплення кожного окремого ковшового елеватора з урахуванням вітрового навантаження.
Окрему увагу треба звернути на головку ковшового елеватора. У самонесучих ковшових елеваторах, навантаження від головки з приводом, передаються через норійні труби на башмак ковшового елеватора, потім на фундамент. Особливості конструкції полягають в тому, що найважчий елемент – головка ковшового елеватора, знаходиться у найвищій точці транспортера. Що в свою чергу призводить до не сприятливого розташування центру тяжіння головки відносно всього ковшового транспортера.
При необхідності збільшення продуктивності ковшового елеватора в самонесучому виконанні, інженери-конструктори зіштовхуються з проблемами які суперечать одна одній:
- забезпечення необхідної потужності (яка зростає відповідно при збільшені висоти і продуктивності);
- збереження центру тяжіння максимально наближеним до вертикальної осі ковшового елеватора;
Зважаючи на вище зазначене, високопродуктивні ковшові елеватори потребують високих потужностей, що в свою чергу конвертується в масу приводу, яка зміщує центр тяжіння головки за межі вісі труб ковшового елеватора. Цей фактор практично унеможливлює розкріплення ковшового елеватора без додаткових конструкцій (робочої вежі).
Отже задача досліджень полягає у тому, щоб порівняти можливі види приводу та визначити оптимальну компоновку головки елеватора.
Для прикладу розглянемо ковшовий елеватор продуктивністю 300 т/год., висотою 38м, потужністю електродвигуна 55 кВт та швидкістю стрічки 3,05 м/с. Головку ковшового елеватора розглядаємо з чотирма різними приводами:
- з конічно-циліндричним редуктором;
- з циліндричним редуктором;
- з циліндричним редуктором та клинопасовою передачею;
- з двома конічно-циліндричними редукторами.
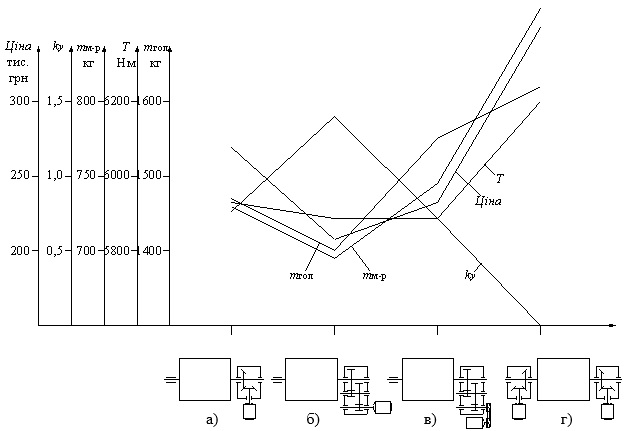
Далі були визначені важливі критерії, власне за якими і проводимо порівняння: маса головки у зборі з приводом; номінальний момент на валу барабана; маса мотор-редуктора; ціна приводу; коефіцієнт зміщення центру маси (ky = 0…1 – центр тяжіння знаходиться в межах підшипникових вузлів, ky > 1 – центр тяжіння знаходиться за межами підшипникових вузлів).
Рис. 1. Графік порівняння критеріїв. Кінематична схема привода з: а) конічно-циліндричним редуктором; б) з циліндричним редуктором; в) з циліндричним редуктором та клинопасовою передачею; г) з двома конічно-циліндричними редукторами.
З отриманого графіка видно, що найбільш вигідною є компоновка з циліндричним редуктором (рис.1 б), майже по всім параметрам, вона має найнижчі показники. Але має найбільший коефіцієнт зміщення центру маси. Це унеможливлює використання подібного привода на самонесучих ковшових елеваторах високої продуктивності. У випадку з двома конічно-циліндричними редукторами (рис.1 г), отримуємо найкращий коефіцієнт зміщення центру маси, але висока вартість і маса двох приводів, обмежують використання подібних конструктивних рішень [1]. Компоновка з циліндричним редуктором і клинопасовою передачею (рис.1 в), має гарні параметри, але реалізація великих потужностей через пасову передачу, доволі складна задача.
Отже, при проектуванні самонесучих ковшових елеваторів високої продуктивності, доцільно використовувати головку з конічно-циліндриним редуктором. (рис.1 а). Як бачимо з графіка, майже усі критерії розташовані дуже щільно. Єдиний недолік даної компоновки є вартість конічно-циліндричного редуктора.
Список посилань:
1. https://www.cimbria.com/en/about/news/giant-bucket-elevator-supplied-in-ukraine.html